
Ce qu'il te faut
- Une brosse à dents
- Un vibreur de téléphone portable
- Une ou deux petites piles bouton
- Fer à souder
- Étain à souder
- 10 cm de fil électrique pour électroniciens
- Scotch double-face
- Scotch d'électricien (légèrement étirable et souvent en plastique coloré)
- Pinces coupantes et pinces pliantes
- Ciseaux
Introduction
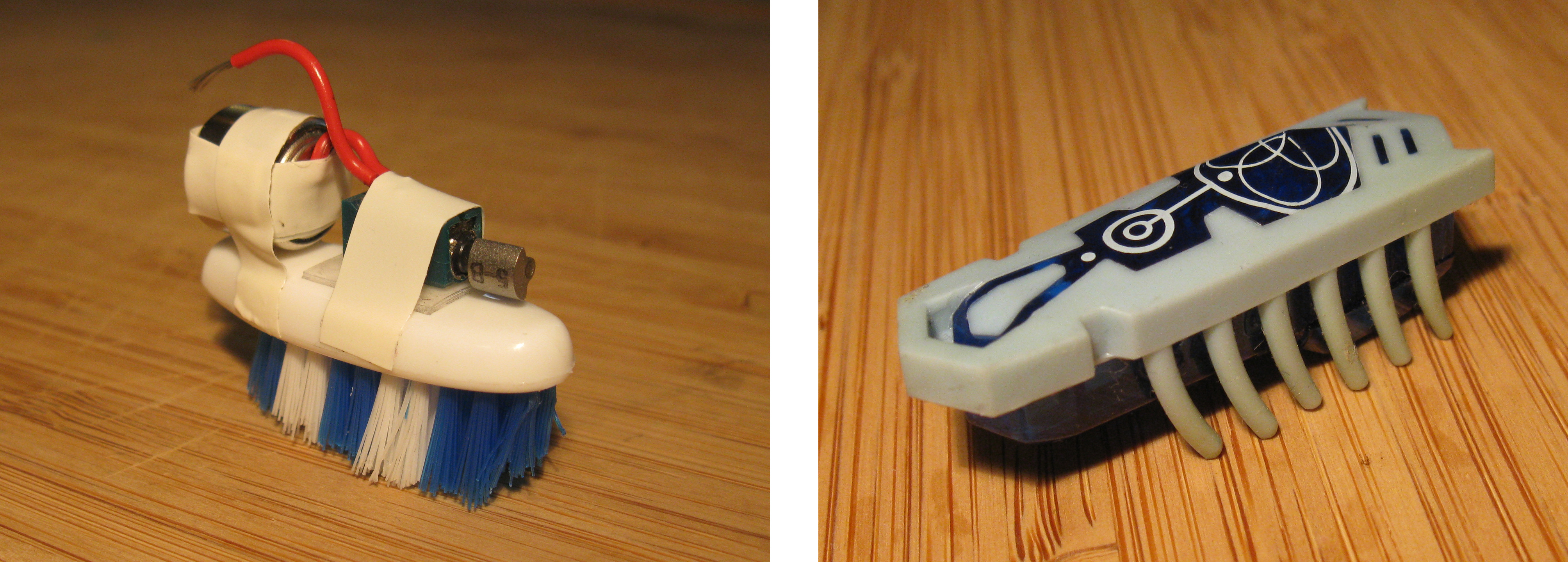
Sur cette page, découvre comment fabriquer un robot avec une brosse à dent et un vibreur de téléphone portable. Le robot est capable de se déplacer ainsi que de changer de direction lorsqu'il rencontre un obstacle.
 Robot-brosse (4,48 Mo) et Hexbug (5,19 Mo).
Robot-brosse (4,48 Mo) et Hexbug (5,19 Mo).
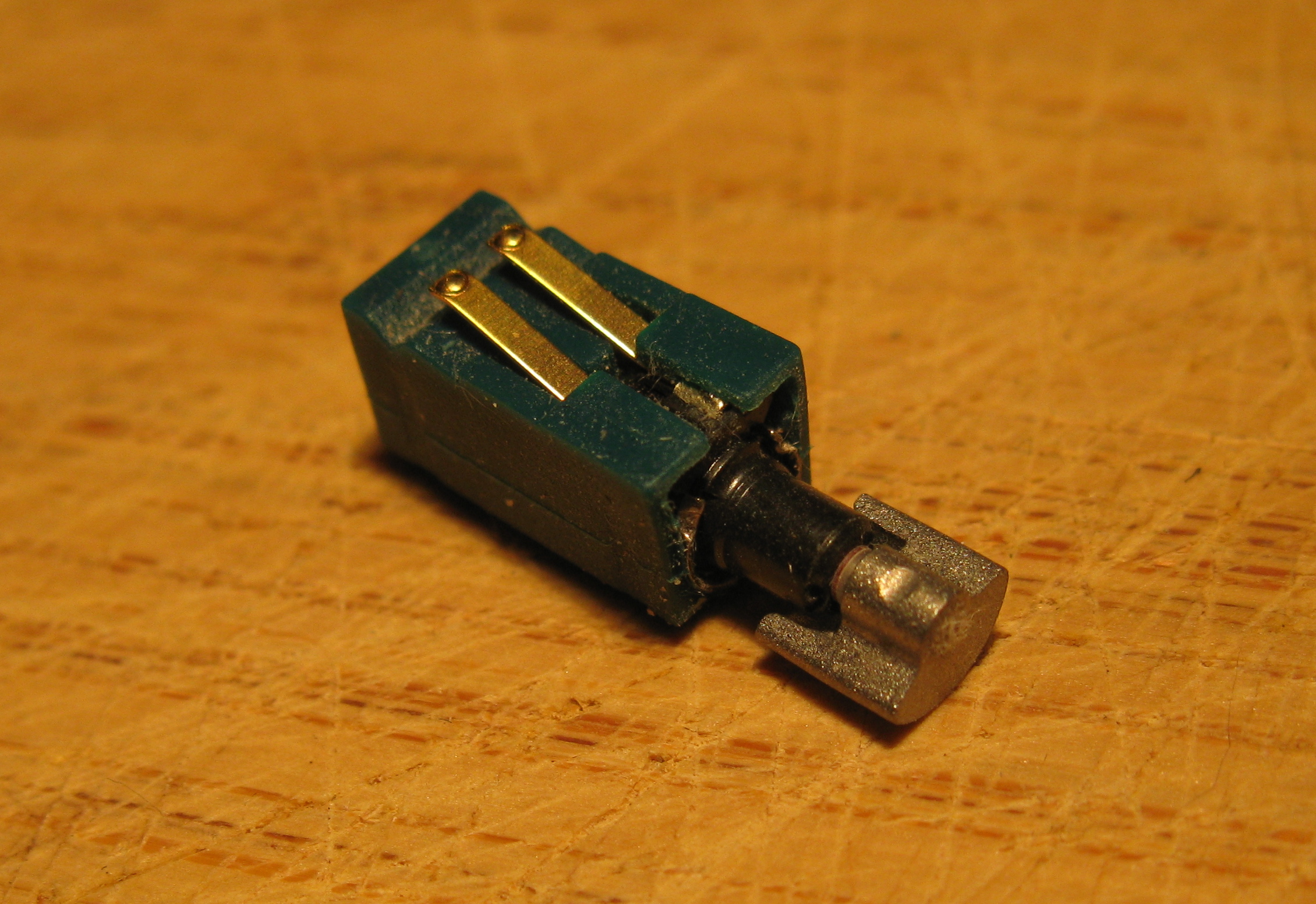
À propos du vibreur de téléphone portable
C'est, de façon simple, un petit moteur avec une petite masse accrochée à son extrémité. La masse étant légèrement désaxée par rapport à la tige tournante du moteur, celle-ci génère des vibrations lorsqu'elle est mise en rotation par le moteur.
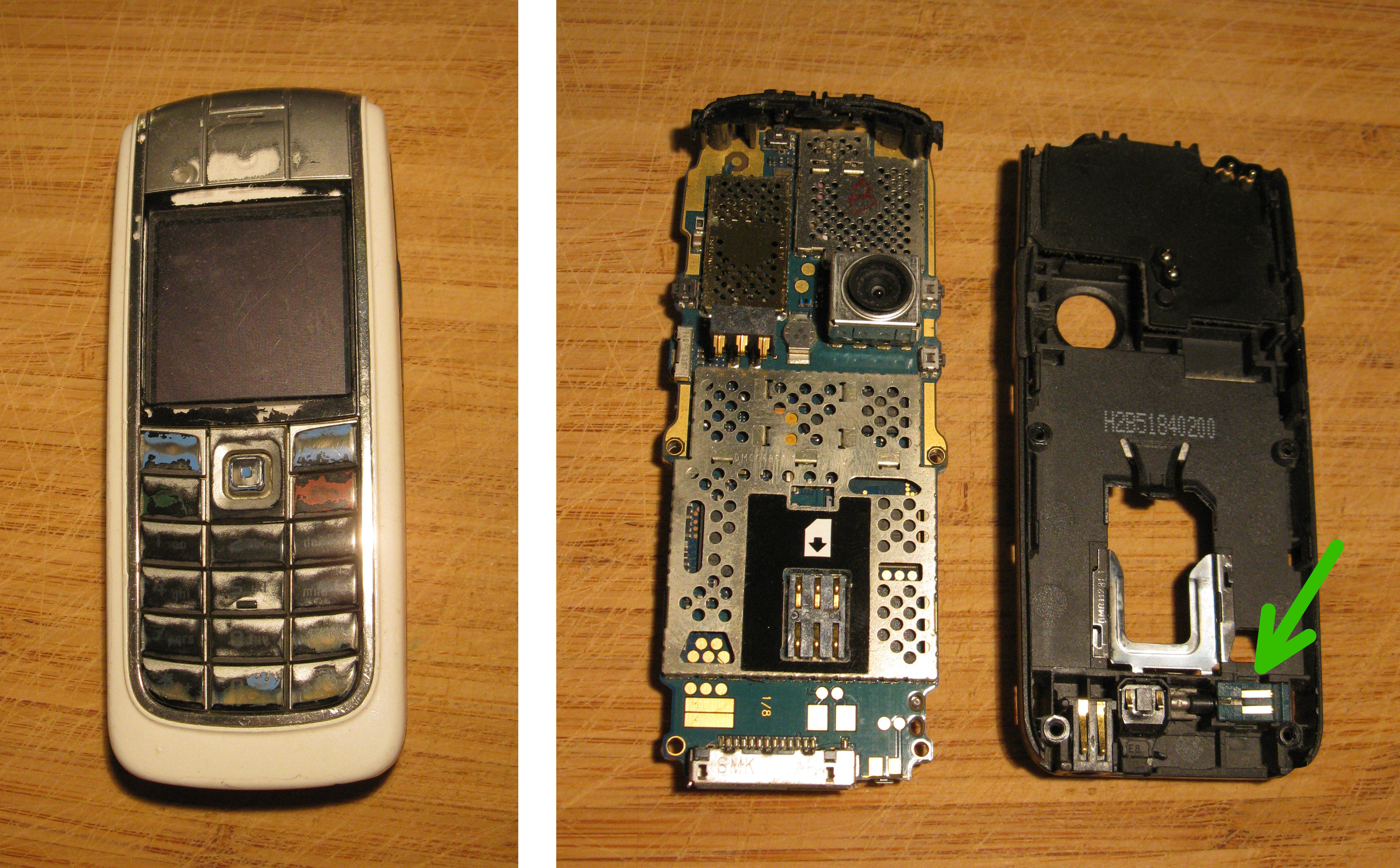
Il est possible de trouver un vibreur pour quelques euros comme pièce détachée de téléphones portables. Mais si tu as un vieux téléphone à jeter, tu peux récupérer son vibreur en démontant le téléphone.
Construction du robot
-
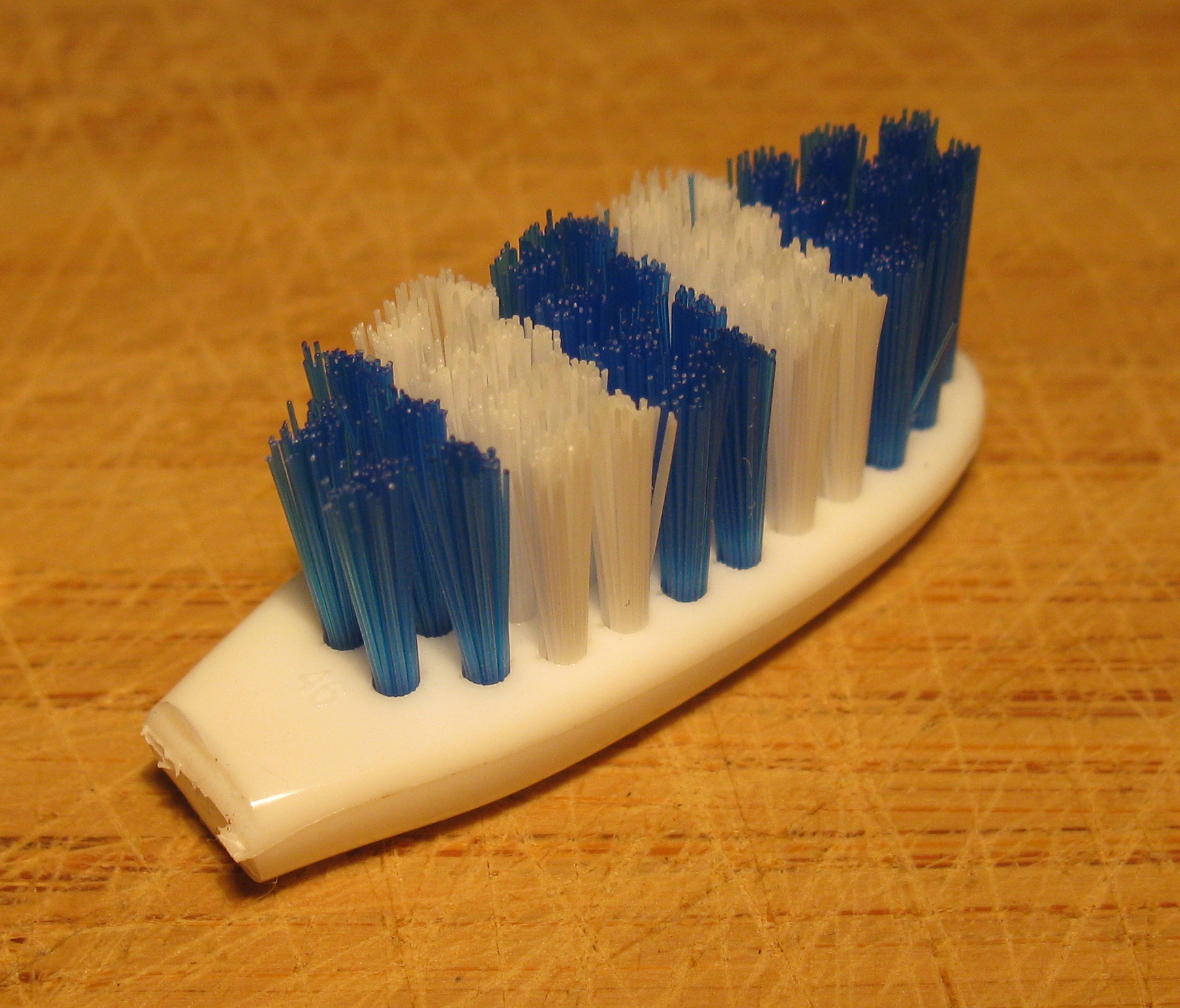
Coupe la tête de la brosse à dents:
-
Tords les poils de la brosse à dents de manière à ce qu'ils soient inclinés. C'est cette inclinaison qui détermine le sens d'avancement du robot.

-
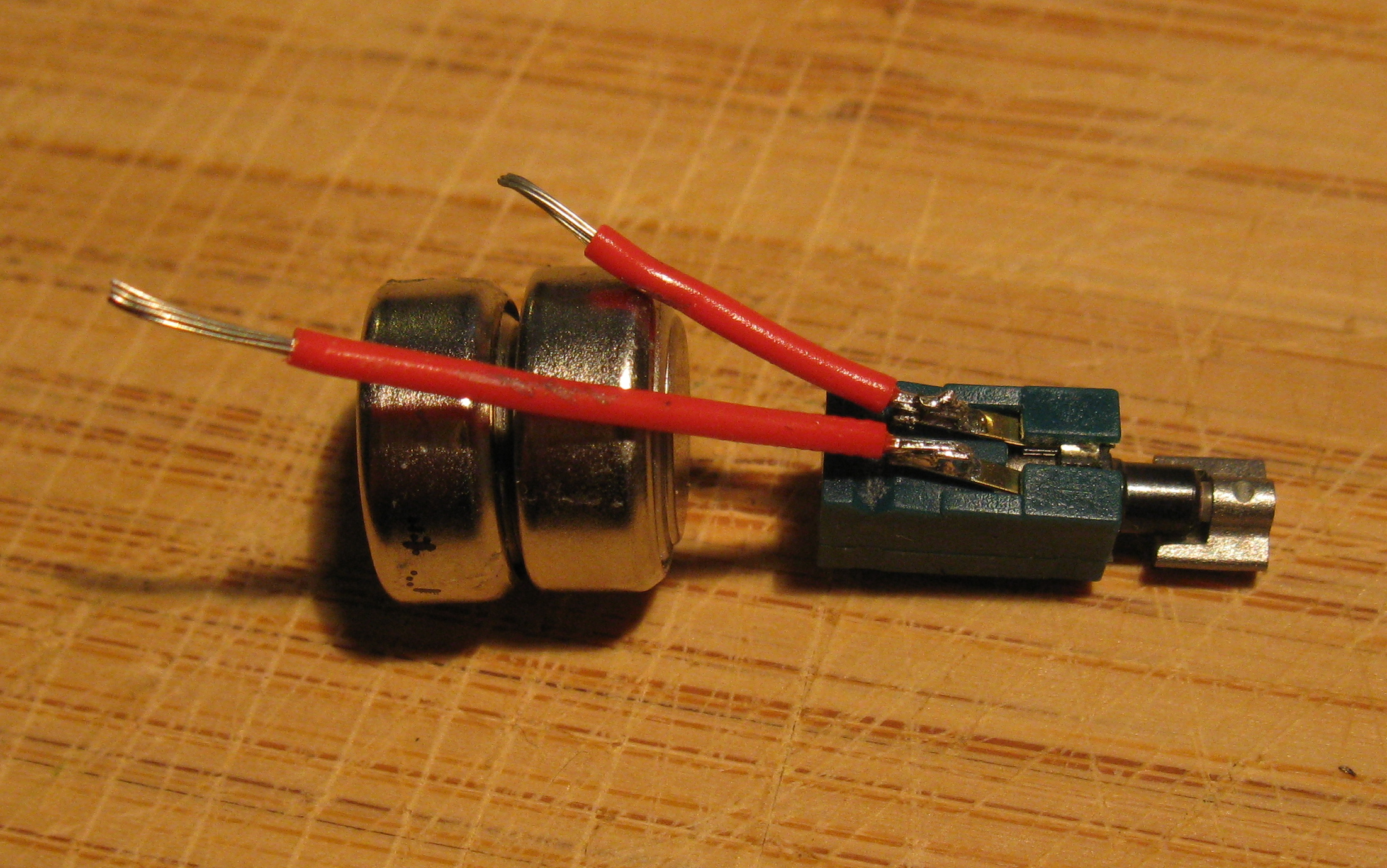
Dénude et soude deux fils de 5 cm de long aux bornes du vibreur:

-
Détermine la tension d'alimentation optimale du vibreur:
-
Alimente le vibreur avec une pile bouton en tenant les fils en contact avec les bornes de la pile. Si le moteur vibre vigoureusement, c'est bon. S'il ne vibre pas, ou qu'il vibre lentement, essaie de l'alimenter avec deux piles en série (empilées l'une sur l'autre).
-
Garde le nombre de piles tels que le vibreur vibre avec une force similaire à un téléphone portable usuel. (Dans mon cas, j'ai eu besoin de deux piles.)
-
-
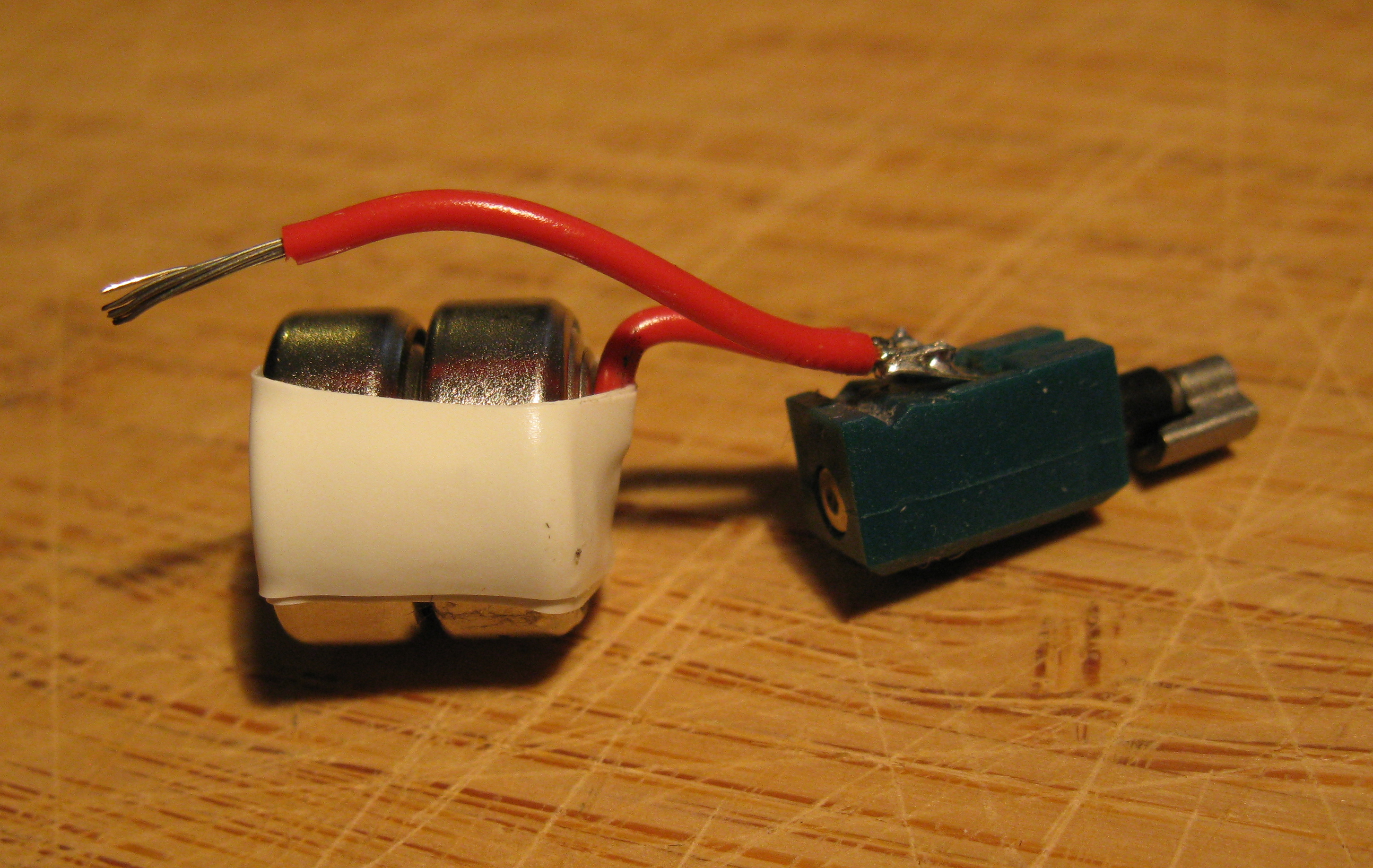
Raccourcis les fils comme indiqué ci-dessous. Les deux fils doivent pouvoir être mis en contact avec les deux bornes de la piles (ou les bornes aux extrémités de l'empilement de piles en série):
-
Avec du scotch d'électricien, fixe le fil le plus court à l'une des bornes de la pile (ou de l'empilement de piles):
-
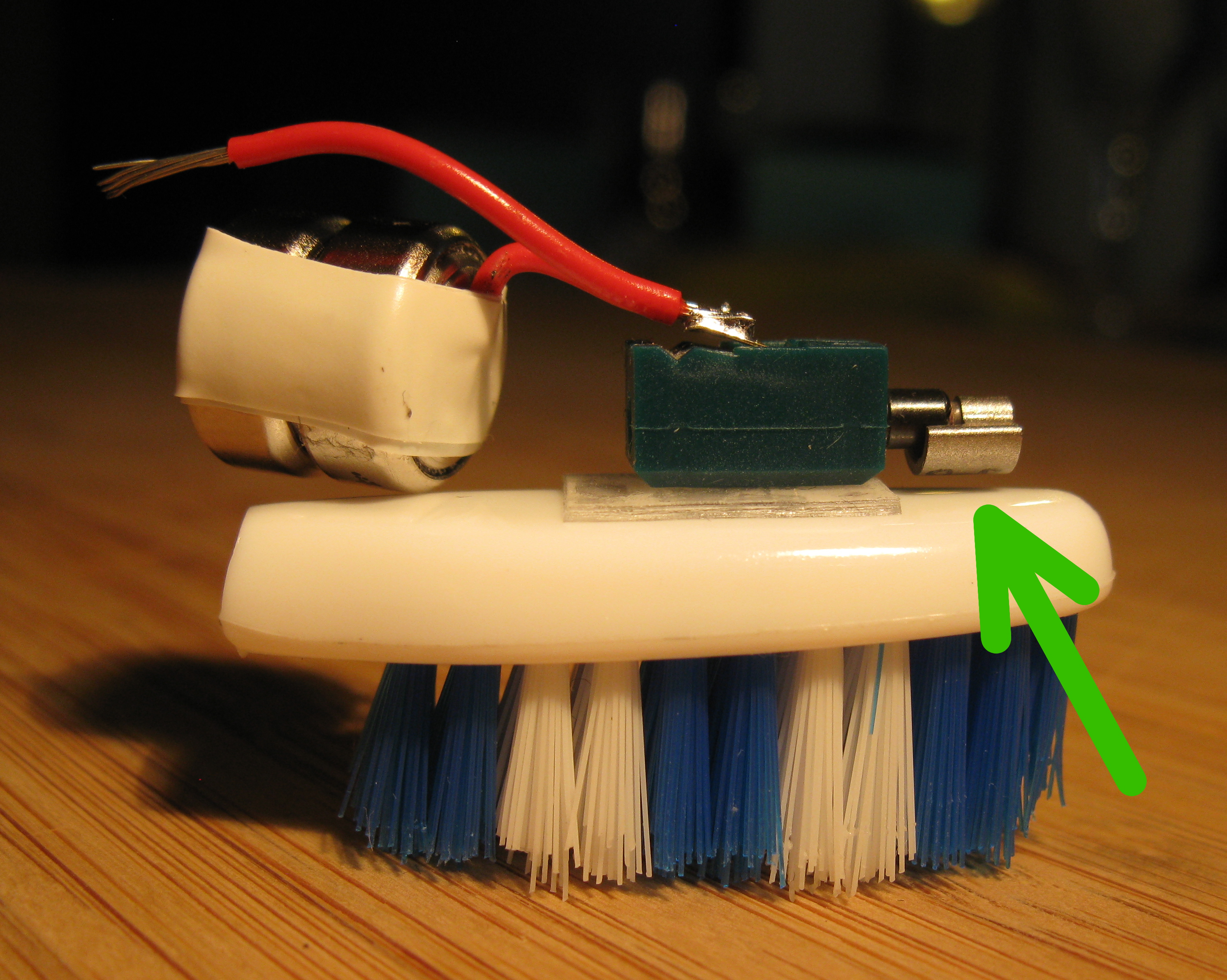
Utilise du scotch double-face pour fixer le vibreur sur le dos de la brosse. Il faut que la partie mobile du vibreur (la petite masse) puisse tourner librement sans toucher le corps de la brosse. Pour y arriver, tu peux empiler plusieurs couches de scotch pour surélever le vibreur et laisser de l'espace entre la brosse et la masse (au niveau de la flèche dans l'image ci-dessous). Si le scotch double-face ne tient pas bien, tu peux utiliser du scotch d'électricien par dessus le vibreur.
-
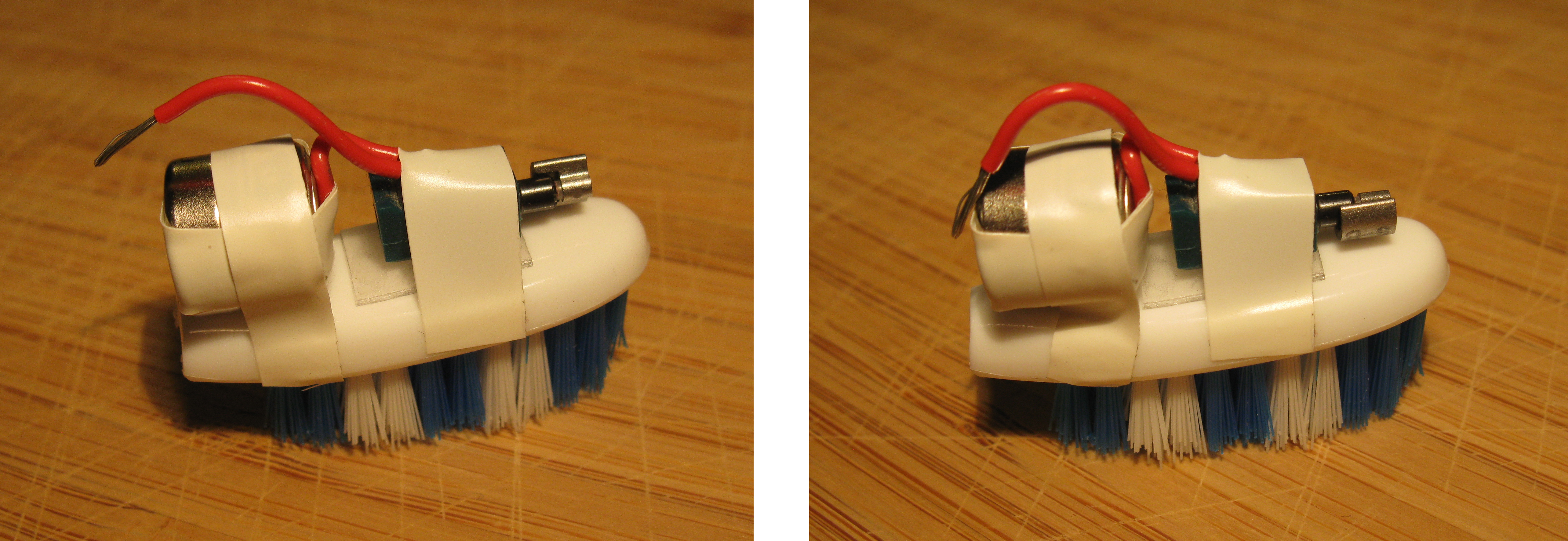
Utilise du scotch d'électricien pour fixer les piles sur le corps de la brosse. Ne recouvre pas entièrement la (ou les) pile(s) de scotch: il faut que la borne la plus éloignée du vibreur soit nue. Le robot-brosse est terminé! Pour le mettre en marche, il suffit de plier le fil libre de manière à ce qu'il touche le contact arrière de la pile.
Utilisation et réglage du robot
Pour tester le robot, trouve un endroit au sol plat, rigide (le robot ne fonctionne pas sur une moquette) et avec quelques obstacles. Démarre-le. S'il tombe, essaie d'écarter les poils de la brosse vers les côtés afin de rendre le robot plus stable. Tu peux aussi raccourcir les poils aux ciseaux pour abaisser le centre de gravité du robot.
Une fois stable, le robot-brosse peut avoir différents comportements, comme le montre les vidéos suivantes. Il peut:
-
Explorer l'espace disponible (4,48 Mo)
-
Explorer les parois (4,95 Mo)
-
Tourner en cercles (1,59 Mo)
-
Tourner sur lui-même (649 ko)
-
Rester coincé dans un coin (1,19 Mo)
Tu peux changer le régime de fonctionnement du robot-brosse en jouant principalement sur les paramètres suivants:
-
Position du vibreur par rapport au corps de la brosse
-
Position des piles par rapport au corps (celles-ci sont lourdes et les déplacer change la position du centre de gravité du robot)
-
Inclinaison des poils de la brosse
Joue sur ces paramètres pour obtenir le fonctionnement optimal où le robot explore l'espace autour de lui, et où il arrive à changer de direction s'il rencontre un obstacle!